工业型智能制造教学系统
联系方式见右侧悬浮框
【工业型智能制造教学系统,柔性制造生产线实训装置】是根据客户需求而写的,非常具有代表性,在客户搜索【工业型智能制造教学系统,柔性制造生产线实训装置】时,都能通过我们来了解相关资讯,而且【工业型智能制造教学系统,柔性制造生产线实训装置】在客户有需求时提供参考意见。
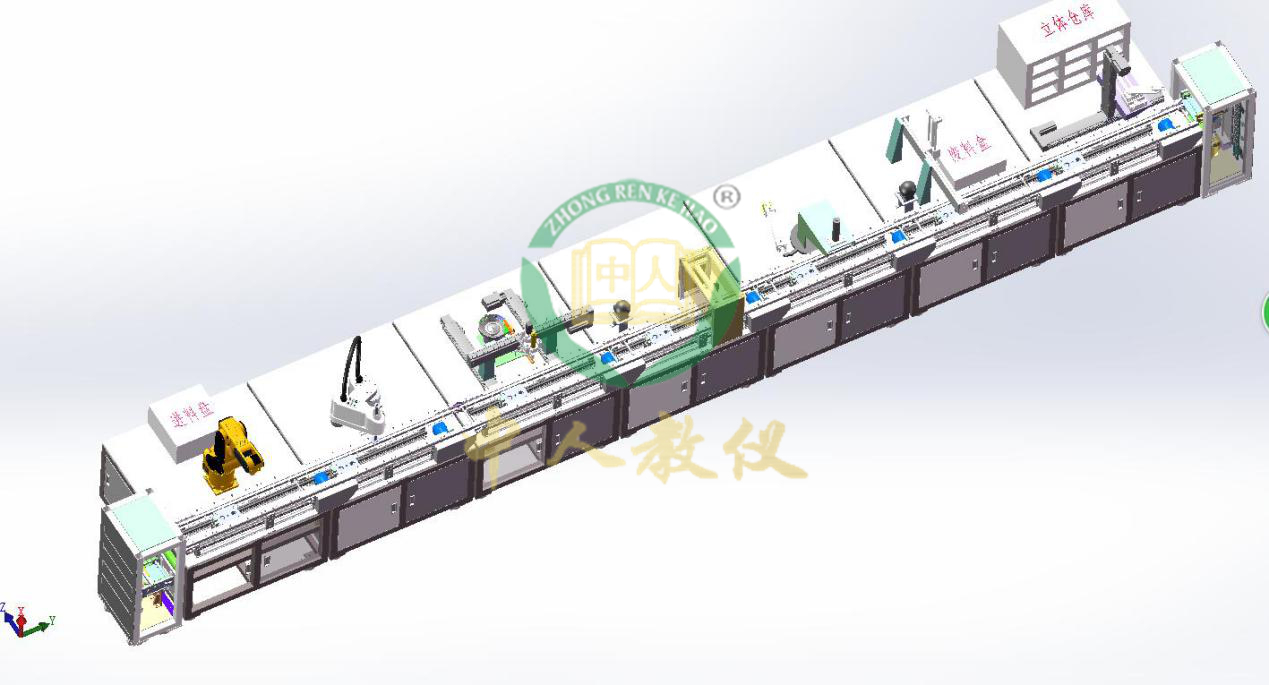
ZRFMS-2000工业型智能制造教学系统
直线型,现场布局尺寸9米X2.5米:
实训内容:
1.机器视觉系统的原理、使用和调试
2.六轴工业机器人系统的原理、使用和调试
3.工业机器人与机器视觉系统综合应用的安装与调试
4.机器视觉系统模板设置、编程与调试
5.通过示教单元手动调试工业机器人
6.通过示教单元设置、修改各控制点坐标
7.通过示教单元编写、修改工业机器人程序
8.机器人追踪坐标整定
9.工业机器人系统的软件二次开发编程
10.智能视觉图像输入编辑与调试
11.智能视觉结果给出编辑与调试
12.智能视觉颜色比对测量
13.智能视觉编号比对测量
14.智能视觉尺寸比对测量
15.智能视觉角度测量
16.智能视觉系统与工业机器人综合应用
17.了解传感器的应用
18.观察气动元件的应用
19.掌握PLC控制技术
20.电气控制系统安装调试
21.机械系统安装调试
22.电机驱动调试
一、工业型智能制造教学系统,柔性制造生产线实训装置概述
工业型智能制造教学系统,柔性制造生产线实训装置是一种最为典型的机电一体化、自动化类产品,它是为职业院校、教育培训机构等而研制的,它适合机械制造及其自动化、机电一体化、电气工程及自动化、控制工程、测控技术、计算机控制、自动化控制等相关专业的教学和培训。它在模拟工业生产制造现场基础上双针对实训教学进行了专门设计,强化了各种控制和工程实践能力。模块化柔性自动化生产线实训系统包含了机电一体化专业中的气动、电机驱动与控制、PLC、变频器、触摸屏、传感器,机器视觉,机器人应用等多种控制技术,适合相关专业学生进行工程实践、课程设计及初上岗位的工程技术人员进行培训。
二、工业型智能制造教学系统,柔性制造生产线实训装置方案特点:
1、工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;2、工作台采用焊接底座,整块铝板,尺寸1200*1100,工业型上下立体组装流水线;
3、系统有可扩展性,可方便扩展AGV小车系统,实现无人工厂;
4、流水线可升级软件实训功能、无人工厂仿真,APP等生产过程可视化,可管可控;
5、具有APP功能,可查看每站的工作状态;
6、具有大数据功能,能查看,统计生产线的生产进展,异常信息;
7、机器人具有拖动示教功能,具有6个方向的拖动示胶功能。
8、具有视觉检测功能,测量精度达到<0.05mm;
9、高精度载具,定位精度<0.05mm; (看大华标书);
10、具有机械整形机构,精度优于0.05mm;
三、工业型智能制造教学系统,柔性制造生产线实训装置技术参数:
1.输入电源:单相三线AC220V ±10% 50Hz,装置容量:<1.5kVA;2.工作环境:环境温度范围为-5℃~+40℃相对湿度<85%(25℃)海拔<4000m
3.标准工作站尺寸:1200mm*1100mm*1800mm;
4.直线型安装,流水线尺寸:9米*2.5米*1.8米;
5.U型安装,流水线尺寸:6米*4米*1.8米;
6.L型安装,流水线尺寸:6.5米*5.5米*1.8米
四、工业型智能制造教学系统,柔性制造生产线实训装置组成:
系统由9个工作站----流水线转向站点1、上料单元、法兰安装站点、锁螺丝单元、液压单元、视觉检测单元、分拣单元、立体仓库单元、流水线转向站点2和一些辅助单元—滚筒皮带转角单元、空直线单元组成。
一)、总体要求,以下技术项必须满足。
1.工作台采用独立模块设计,安装时可组成直线型,L,U型组线;2.工作台采用焊接底座,整块铝板,尺寸1200*1100;
3.采用上下立体组装流水线,具有载具定位,阻档功能;
4.系统具有可扩展性,可方便扩展AGV小车,实现自动进料;
5.具有APP功能,可查看每站的工作状态,并操作每个站的功能;
6.具有大数据功能,能查看,统计生产线的生产进展,异常信息;
7.机器人具有拖动示教功能,具有6个方向的拖动示教功能。
8.具有视觉检测功能,测量精度达优于0.1mm;
9.高精度载具,定位精度优于0.1mm;
10.具有机械整形机构,精度优于0.1mm;
总体布局示意图如下:

U型,现成布局尺寸6米X4米

L型,现成布局 6.5米X5.5米
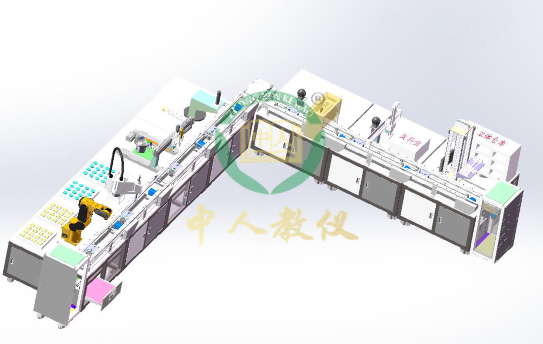
备注:以上示意图不代表与实物完全相同。
工业型智能制造教学系统,柔性制造生产线实训装置硬件配置清单
|
序号 |
物料名称 |
数量 |
备注 |
|
1 |
流水线转向 |
2 |
包含1套载具回流阻挡机构 |
|
2 |
标准工作台 |
7 |
|
|
3 |
6关节工业机器人 |
1 |
|
|
4 |
SCARA工业机器人 |
1 |
|
|
5 |
上层输送线 |
7 |
|
|
6 |
下层输送线 |
7 |
|
|
7 |
阻挡定位升降组件 |
7 |
有BUFFEER 功能 |
|
8 |
工装吸盘组件 |
2 |
|
|
9 |
螺丝振动盘 |
1 |
|
|
10 |
高精度3坐标机器人 |
1 |
|
|
11 |
伺服电批组件 |
1 |
|
|
12 |
气动直角机器人 |
1 |
|
|
13 |
液压组件 |
1 |
|
|
14 |
电梯式立体仓库 |
1 |
|
|
15 |
龙门式安装视觉组件 |
1 |
|
|
16 |
红外扫描组件 |
2 |
|
|
17 |
机械式整形组件 |
2 |
|
|
18 |
料盘 |
2 |
每个料盘一次性可承放多个物料 |
|
19 |
阻挡组件 |
2 |
采用阻挡气缸 |
|
20 |
载具 |
12 |
|
|
21 |
物料 |
12 |
物料有不同材质、大小、颜色区别 |
|
22 |
高精度治具 |
12 |
|
|
23 |
电脑 |
8 |
|
|
24 |
实训电脑桌 |
8 |
1、流水线转向单元硬件配置清单
|
序号 |
组成项 |
数量 |
技术要求 |
|
1 |
升降机架 |
1 |
50X50方管 |
|
2 |
升降组件 |
1 |
1、步进驱动
2、线轨丝杆模组
3、装有原点关,限位开关 |
|
3 |
换向组件 |
1 |
1、异步减速电机驱动 2、同步带流水线 |
知识应用点如下
1.1 升降丝杆,同步带换向、原点开关、接近开关、同步轮、同步带、异步减速电机。
1.2 升降机的原理、进步电机的原理、机械式限位阻挡
此单元硬件配置清单
| 序号 | 组成项 | 数量 | 技术要求 |
| 1 | 标准工作台 | 1 | 标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
| 2 | ▲6关节工业机器人 | 1 | 6关节机器人,行程>700mm,负载6Kg。机器人具有拖动示教功能,具有6个方向的拖动示胶功能 |
| 3 | 法兰底座料盘 | 1 | 料盘一次性可承放9个物料 |
| 4 | ▲机械式整形组件 | 1 | 整形精度优于0.1mm; |
| 5 | 上层输送线 | 1 |
速度可调,且运行时可切换速度, 0≦V≦30M/Min;同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
| 6 | 下层输送线 | 1 | 速度可调,0≦V≦30M/Min |
| 7 | 阻挡升降定位组件 | 1 | 高精度定位,定位精度<0.1mm |
| 8 | 吸盘工装组件 | 1 | 采用真空吸盘取料、负压传感器检测 |
此单元知识应用点:
2.1 本工站包含6关节机器人、阻挡定位机构、同步带线体、滚轴皮带线、法兰底座进料盘、法兰底座、载具托盘、异步电机、真空吸盘、接近开关、负压传感器、电磁阀、可调式漫反射传感器
2.2 学习机器人基本编程、学习机器人的示教上料操作、学习机器人通过拖动示教上料操作
3、法兰安装站点硬件配置清单
|
序号 |
物料名称 |
数量 |
备注 |
|
1 |
标准工作台 |
1 |
标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100X20MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
|
2 |
法兰进料盘 |
1 |
料盘一次性可承放多个物料 |
|
3 |
SCARA工业机器人 |
1 |
快速,高精度抓取 |
|
4 |
机械式整形组件 |
1 |
|
|
5 |
上层输送线 |
1 |
速度可调,且运行时可切换速度
0≦V≦30M/Min;同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
|
6 |
下层输送线 |
1 |
速度可调,0≦V≦30M/Min |
|
7 |
阻挡定位升降组件 |
1 |
高精度定位,定位精度<0.05mm |
知识点:
3.1 法兰进料盘、法兰、SCARA机械手、载具托盘、阻挡定位机构、同步带线体、滚轴皮带线、异步电机、接近开关、真空吸盘、负压传感器、电磁阀、可调式漫反射传感器、气缸、磁性开关3.2 SCARA机械手原理、应用、传感器
|
序号 |
物料名称 |
数量 |
备注 |
|
1 |
标准工装台 |
1 |
标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100X20MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
|
2 |
振动盘 |
1 |
|
|
3 |
线轨丝杆三坐标机器人 |
1 |
伺服驱动,高精度运行 |
|
4 |
伺服电批 |
1 |
数控扭力电批且带行程检测感应器 |
|
5 |
阻挡定位升降组件 |
1 |
高精度定位,定位精度<0.05mm |
|
6 |
上层输送线 |
1 |
速度可调,且运行时可切换速度
0≦V≦30M/Min;同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
|
7 |
下层输送线 |
1 |
速度可调,0≦V≦30M/Min |
知识点:
4.1 振动盘、直线输送器、3轴坐标机器人、伺服电机、丝杆、滑轨、力矩传感器伺服电批、载具托盘、阻挡定位机构、同步带线体、滚轴皮带线、异步电机、接近开关、真空吸盘、负压传感器、电磁阀、原点开关、可调式漫反射传感器、行程检测传感器、气缸、磁性开关
4.2 伺服电机、丝杆、滑轨的应用
|
序号 |
物料名称 |
数量 |
备注 |
|
1 |
标准工作台 |
1 |
标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100X20MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
|
2 |
红外扫描仪 |
1 |
|
|
3 |
视觉检测 |
1 |
龙门式安装,测量精度达到0.05mm |
|
4 |
阻挡定位升降组件 |
1 |
高精度定位,定位精度<0.05mm |
|
5 |
阻挡组件 |
1 |
采用阻挡气缸 |
|
6 |
上层输送线 |
1 |
速度可调,且运行时可切换速度
0≦V≦30M/Min,同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
|
7 |
下层输送线 |
1 |
速度可调,0≦V≦30M/Min |
知识点:
5.1 红外扫描仪、龙门式固定支架、工业相机、镜头、光源
5.2 红外检测原理、视觉检测原理
|
序号 |
物料名称 |
数量 |
备注 |
|
1 |
标准工作台 |
1 |
标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100X20MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
|
2 |
液压组件 |
1 |
采用齿轮,油缸,连杆机构 |
|
3 |
上层输送线 |
1 |
速度可调,且运行时可切换速度
0≦V≦30M/Min,同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
|
4 |
下层输送线 |
1 |
速度可调,0≦V≦30M/Min |
|
5 |
阻挡定位升降组件 |
1 |
高精度定位,定位精度<0.05mm |
知识点:
6.1连杆机构、双作用油缸(带行程撞块)、节流阀(直动式)、单向阀、液控单向阀、溢流阀(直动式)、先导式溢流阀、先导式单向顺序阀、单向调速阀、先导式单向减压阀、电磁换向阀
|
序号 |
物料名称 |
数量 |
备注 |
|
1 |
标准工作台 |
1 |
标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100X20MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
|
2 |
气动直角机器人 |
1 |
采用气缸 |
|
3 |
上层输送线 |
1 |
速度可调,且运行时可切换速度
0≦V≦30M/Min,同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
|
4 |
下层输送线 |
1 |
速度可调,0≦V≦30M/Min |
|
5 |
阻挡定位升降组件 |
1 |
高精度定位,定位精度<0.05mm |
|
6 |
红外扫描仪 |
1 |
|
|
7 |
吸盘工装组件 |
1 |
采用真空吸盘,负压传感器 |
知识点:
7.1 红外线扫描、气动直角机器人、吸盘
7.2红外线扫描、气动直角机器人、吸盘使用原理、真空发生器原理
|
序号 |
物料名称 |
数量 |
备注 |
|
1 |
标准工作台 |
1 |
标准工作台采用独立模块设计,安装时,可组成直线型,L,U型组线;底架组件采用50X50方管焊接,1200X1100X20MM铝板;上架组件采用40X40型材,茶色有机玻璃 |
|
2 |
电梯式立体仓库 |
1 |
采用链轮、链条升降 |
|
3 |
上层输送线 |
1 |
速度可调,且运行时可切换速度
0≦V≦30M/Min,同步带采用耐磨耐脏的半透明聚氨酯带钢丝同步带。 |
|
4 |
下层输送线 |
1 |
速度可调,0≦V≦30M/Min |
|
5 |
阻挡定位升降组件 |
1 |
高精度定位,定位精度<0.05mm |
|
6 |
取料工装 |
1 |
采用气动手指 |
知识点:
8.1 链轮、链条、异步电机、导轨、行程开关、步进电机,配重块、无杆气缸、旋转气缸,手指气缸
8.2电梯的编程控制原理、链轮链条的结构和功能
|
序号 |
物料名称 |
数量 |
备注 |
|
1 |
升降机架 |
1 |
50X50方管 |
|
2 |
线轨丝杆模组 |
1 |
步进驱动 |
|
3 |
换向组件 |
1 |
异步减速电机驱动 |
知识点:
9.1 本站包含升降丝杆,同步带换向、原点开关、接近开关、同步轮、同步带、异步电机。
9.2 升降机的原理、进步电机的原理、机械式限位阻挡
在设计该模拟生产线时,为了能反映网络技术的迅猛发展及在控制系统中的应用,采用了MITSUBISHI公司的CC-LINK现场总线控制系统,选用了MITSUBISHI的Q系列PLC作主站、Fx-2n系列PLC作从站,主从之间采用CC-LINK总线通信。
当9个单元全部进入联网状态时,管理员能够通过组态监控机中各种组态按钮方便的控制整个系统的运行、暂停、继续、停止等等待另外也可以控制单个单元的运行、暂停、继续、停止等。每个单元的工作状态以及工件的材质、颜色等在监控画面上也能够清楚的看到。
本星空(中国)使用机器人专用调试编程软件,可以对机器人进行编程和调试。该软件具有文本编辑区、位置列表区、属性指示区、项目管理区等窗口,可以对机器人进行调试。调试时可对机器人进行如下操作:程序编辑、伺服开和关、运行速度设置、各关节位置给定、运行和停止、单步执行指令、连续执行指令、程序跳转执行等。同时该软件提供底层驱动接口函数,可供用户进行二次开发使用及进行深层次机器人控制技术的研究。
本系统配置了APP查看功能,管理员能够通过组态监控机中各种组态按钮方便的控制整个系统的运行、暂停、继续、停止等每个单元的工作状态以及工件的材质、颜色等在监控画面
系统具有大数据功能,能查看,统计生产线的生产进展,异常信息;
原文网址:/proshow.asp?ID=1025
尊敬的用户: 如果您对我们的[ZRFMS-2000工业4.0模式化柔性自动化生产线实训系统]比较满意,想要建设与[ZRFMS-2000工业4.0模式化柔性自动化生产线实训系统]相关的实训室或者想要知道更多的资料,请直接在线咨询或者来电详询,我们会有专门的客服和您对接,帮助您了解[ZRFMS-2000工业4.0模式化柔性自动化生产线实训系统]。
售后:我们承诺在质保期内,若[ZRFMS-2000工业4.0模式化柔性自动化生产线实训系统]出现属于质量问题造成零部件损坏的,我们提供免费维护与维修,若需要专业的技术人员进行维修,我们也可以通过对[ZRFMS-2000工业4.0模式化柔性自动化生产线实训系统]故障诊断后,派人上门维。中人公司还承诺:在质保期外,维修和更换[ZRFMS-2000工业4.0模式化柔性自动化生产线实训系统]零部件仅收成本费的。
如对本产品/文章:工业型智能制造教学系统,柔性制造生产线实训装置有任何疑问请随时星空网页版,我们将尽力为您提供最全的实训室建设方案和最优质的服务
本文关键词:工业型智能制造教学系统,柔性制造生产线实训装置
【工业型智能制造教学系统,柔性制造生产线实训装置】是上海中人原创,如果您在了解产品的过程中受到启发,想要咨询相关星空(中国)的问题,我们将派专员为您解决疑问,或者您在阅读【工业型智能制造教学系统,柔性制造生产线实训装置】中有想不通的问题,也可以咨询我们,我们将为您提供快速解决【工业型智能制造教学系统,柔性制造生产线实训装置】问题的方案
相关热词:
这些是最新的
热门关键词

热门排行
